Balancing User Control and Perceived Robot Social Agency through the Design of End-User Robot Programming Interfaces
Jan 1, 2025· ,,·
0 min read
,,·
0 min read
Alex Wuqi Zhang
Rafael Queiroz
Sarah Sebo
Abstract
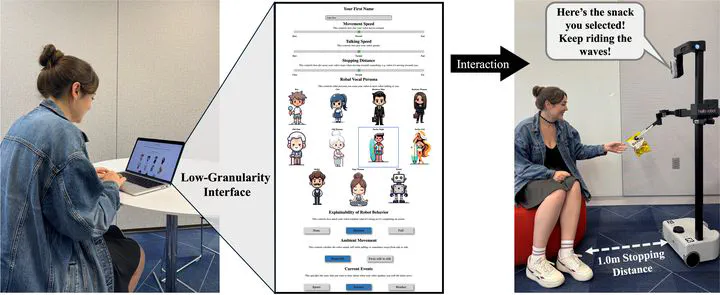
Perceived social agency–the perception of a robot as an autonomous and intelligent social other–is important for fostering meaningful and engaging human-robot interactions. While end-user programming (EUP) enables users to customize robot behavior, enhancing usability and acceptance, it can also potentially undermine the robot’s perceived social agency. This study explores the trade-offs between user control over robot behavior and preserving the robot’s perceived social agency, and how these factors jointly impact user experience. We conducted a between-subjects study (N = 57) where participants customized the robot’s behavior using either a High-Granularity Interface with detailed block-based programming, a Low-Granularity Interface with broader input-form customizations, or no EUP at all. Results show that while both EUP interfaces improved alignment with user preferences, the Low-Granularity Interface better preserved the robot’s perceived social agency and led to a more engaging interaction. These findings highlight the need to balance user control with perceived social agency, suggesting that moderate customization without excessive granularity may enhance the overall satisfaction and acceptance of robot products.
Type
Publication
In ACM/IEEE International Conference on Human-Robot Interaction